
Running Zephyr on UETRV-PCore with RISC-V
What is Zephyr?
Zephyr is a scalable, open-source, real-time operating system (RTOS) designed for resource-constrained devices. It supports a wide range of hardware architectures, including RISC-V, ARM, x86, and others, making it an ideal choice for embedded systems and Internet of Things (IoT) applications. Zephyr provides a lightweight kernel, a configurable set of features, and a rich ecosystem of libraries and tools, enabling developers to build efficient and reliable applications.
What is UETRV-PCore?
UETRV-PCore is a 32-bit RISC-V System on Chip (SoC) developed at UET Lahore. It is built around a 5-stage pipelined processor that supports the RV32IMACZicsr instruction set architecture (ISA). The design includes support for multiple privilege modes (Machine, Supervisor, and User), making it suitable for both embedded and general-purpose computing applications. The SoC features an MMU based on the Sv32 standard, along with 32KB instruction and data caches to optimize performance. Additionally, it integrates essential peripherals such as UART, SPI, and PLIC, enabling communication and interrupt handling. Capable of running Linux, UETRV-PCore also includes comprehensive architecture compatibility tests using RISOF, ensuring robustness and compliance with the RISC-V specifications.
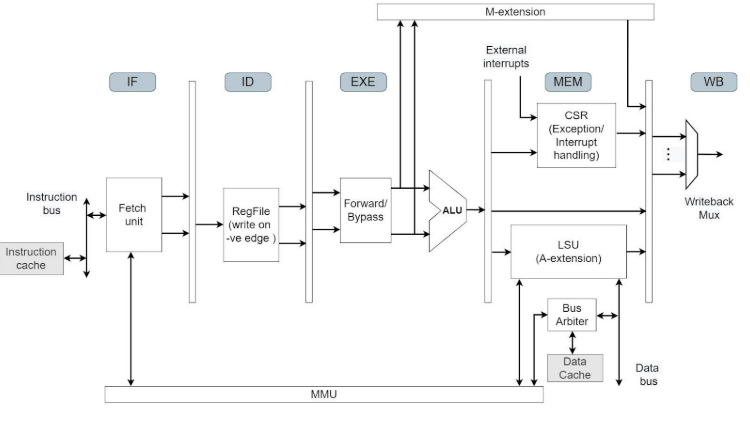
Fig 1.1 : System Design Overview
Key Features:
- Core: RV32IMACZicsr, 5-stage pipeline, supports privilege modes.
- Caches: 32KB instruction cache, 32KB data cache.
- MMU: Sv32-based, shared page-table walker.
- Peripherals: UART, SPI, PLIC, CLINT.
- Performance: 2.0 Coremark/MHz.
- Configurable: Cache sizes, TLB entries.
Simulation and Linux Boot:
The design supports simulation using Verilator and booting Linux via prebuilt images. Verilator models allow custom parameters (imem, max_cycles, vcd) and waveform generation for debugging. Linux boot images integrate OpenSBI and BusyBox-based rootfs.
FPGA Implementation:
Supports Nexys A7 (100T) with Vivado. Prebuilt bitstreams and Linux boot images are available.
Getting Started:
Install required tools (gcc-riscv64-unknown-elf, Verilator) and use provided Makefile to build, simulate, and test.
For detailed documentation, visit UETRV-PCore Documentation.
Exploring Zephyr on UETRV-PCore
In our journey to run Zephyr on the UETRV-PCore, we navigated several challenges, from setting up the RISC-V toolchain to configuring the device tree and adapting Zephyr to work seamlessly with the SoC. This blog documents our step-by-step approach, covering everything from installing the necessary tools and dependencies to debugging and optimizing Zephyr for the UETRV-PCore.
Our exploration highlights key aspects of integrating Zephyr with a custom RISC-V processor, offering insights into the process and overcoming common hurdles, ultimately achieving a functional and efficient implementation.
Prerequisites:
Before we began the installation process, we ensured that we had the following tools and environments set up:
- riscv32-elf-ubuntu-22.04-gcc-nightly-2024.04.12-nightly
- Spike
- Qemu
- ModelSim
- GTKWave
RISC-V Toolchain and Verilator
We needed to install the RISC-V toolchain to compile Zephyr applications and Verilator to simulate the UETRV-PCore processor. The following command helped us install the necessary tools:
sudo apt-get install -y gcc-riscv64-unknown-elf verilator gtkwaveZephyr SDK and Environment Setup
The Zephyr SDK was essential for building Zephyr applications. We followed the official Zephyr Project documentation to download and set up the SDK. Once downloaded, we activated the environment with the following commands:
source ~/zephyrproject/.venv/bin/activate
export ZEPHYR_TOOLCHAIN_VARIANT=zephyr
export ZEPHYR_SDK_INSTALL_DIR=~/zephyr-sdk-0.16.8/Building Zephyr for UETRV-PCore
Updating the Zephyr Device Tree (DTS)
Zephyr uses Device Tree files (.dts) to configure hardware. Since the UETRV-PCore employed a different UART driver (SiFive UART), we needed to make modifications. Specifically, we updated the virt-riscv.dtsi file according to the sifive_uart driver to match the hardware architecture of UETRV-PCore.
Building Zephyr for QEMU-RISC-V
Before using physical hardware, we decided to test Zephyr with a RISC-V simulation on QEMU. We built the hello_world application for the qemu_riscv32 board:
cd ~/zephyrproject/zephyr/samples/hello_world west build -b qemu_riscv32 --pristine
west build -t runTesting Zephyr on QEMU
Once the build was complete, we used QEMU to simulate the RISC-V environment. We ran the application and verified that “Hello, World!” was printed on the console. This confirmed that the Zephyr configuration and application were working correctly:
west build -b qemu_riscv32 --pristine
west build -t runBuilding Zephyr.elf for UETRV-PCore
- Converting .elf to imem.txt:
- Disassemble the zephyr.elf:
To run Zephyr on UETRV-PCore, we needed to convert the zephyr.elf file into a format compatible with UETRV-PCore's custom memory map. We followed these steps to generate the imem.txt file:
We generated a disassembly listing for zephyr.elf:
riscv64-unknown-elf-objdump -d zephyr.elf > zephyr.dumpWe created a binary file from the zephyr.elf:
riscv64-unknown-elf-objcopy -O binary zephyr.elf zephyr.binWe used the xxd tool to generate a hexadecimal representation:
xxd -p -c 8 zephyr.bin > imem.txtTo facilitate transferring the binary file to the UETRV-PCore, we zipped the imem.txt file:
zip imem.zip imem.txtUsing Spike and ModelSim for Verification
In addition to QEMU, we used Spike, a RISC-V ISA simulator, to validate the behavior of Zephyr running on the UETRV-PCore. Spike allowed us to simulate the execution of Zephyr on a more accurate model of the RISC-V architecture.
We also used ModelSim for hardware-level verification and simulation of the UETRV-PCore. ModelSim enabled us to simulate the RTL design of the processor and verify its interactions with Zephyr.
Zephyr RTOS – Device Tree Handling:
Static Configuration at Build Time
- Processes DTS During Build: Zephyr processes Device Tree Source (DTS) files directly during the build phase.
- Generates Static C Headers: From the DTS, static C headers are generated to configure the hardware at compile-time.
- Requires Firmware Rebuild for Changes: Any modifications in hardware configuration require a full firmware rebuild to take effect.
- Optimized for Embedded Systems: This static approach is beneficial for resource-constrained systems, minimizing runtime overhead and optimizing for deterministic performance.
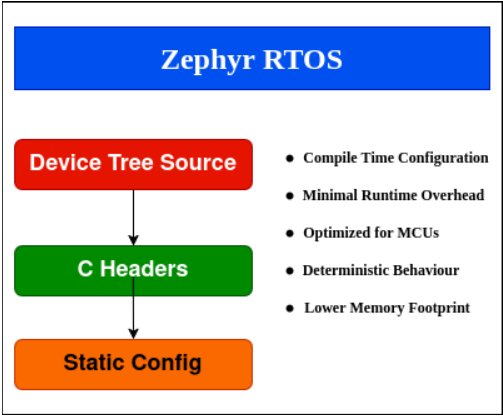
Fig 1.2 : Device Tree Handling
This summary focuses on the key aspects of how Zephyr RTOS handles Device Tree in a static and compile-time manner, making it well-suited for embedded systems.
Running Zephyr on Physical UETRV-PCore
When we were ready to run Zephyr on actual hardware, we followed these steps to load the binary image into the UETRV-PCore and begin the simulation process:
Replacing the Generated IMEM File:
We replaced the previously generated imem.txt file with the new zephyr.elf file in the /UETRV-PCore/sdk/example-linux directory.
Simulating Linux Boot:
To simulate the Linux booting process using the pre-built image, we executed the following command:
make sim-verilate-linuxHowever, when we checked the UART output in the uart_logdata.log file, we observed that the log contained garbage data instead of the expected output.
Debugging and Resolving Issues
After encountering the issue of garbage data in the UART log, we analyzed the potential reasons for the mismatch and identified the following causes:
- Incorrect UART Driver Configuration:
- Check Register Mapping:
- Using Debugging Tools:
The garbage data likely occurred because the ns16550 UART driver was used in the original configuration. However, UETRV-PCore uses the sifive_uart driver, which has different register addresses and functionality. This mismatch caused the incorrect behavior, as the ns16550 driver was not compatible with the UETRV-PCore’s hardware configuration.
Solution:We modified the virt-riscv.dtsi file to replace the ns16550 driver with the sifive_uart driver, which is the correct driver for the UETRV-PCore. This ensured that the UART interface was properly configured and aligned with the hardware.
Upon closer inspection, we realized that there were differences in the register addresses between the sifive_uart driver and the ns16550 driver. Specifically, the registers used by the sifive_uart in UETRV-PCore were not available in the ns16550 driver, and some of the register addresses were different, which caused the garbage data issue.
Solution:We reviewed the memory-mapped registers for both the Zephyr application and the UETRV-PCore. By aligning the registers in the device tree (specifically in the virt-riscv.dtsi file), we ensured that the UART’s memory-mapped I/O addresses matched the configuration of the sifive_uart peripheral in UETRV-PCore.
To further troubleshoot and verify the correctness of our simulation, we used debugging tools such as gtkwave and Verilator. These tools helped us analyze the simulation waveform, inspect the timing, and check if data was being correctly transmitted over the UART interface.
Solution:By running simulations with Verilator and inspecting the waveforms in gtkwave, we were able to verify the correct functionality of the UART interface and ensure that the Zephyr application was executing properly on the UETRV-PCore.
Conclusion
Running Zephyr on UETRV-PCore provided us with a powerful and efficient platform for embedded applications using the RISC-V architecture. By carefully addressing the challenges related to UART driver mismatches and ensuring proper register mapping, we were able to successfully run Zephyr applications on both simulation environments and real hardware.
With further optimizations, Zephyr on UETRV-PCore offers a solid foundation for developing embedded systems, especially in educational settings where understanding processor design and real-time operating systems is essential.
Useful Links
- Zephyr Project Documentation: Zephyr Project Documentation
- Zephyr GitHub Repository: Zephyr GitHub
- UETRV-PCore GitHub Repository: UETRV-PCore GitHub
- Zephyr SDK: Zephyr SDK Installation Guide